After you have defined your devices, use the Workbench to access the variables that reside in those devices.
- From the Workbench left pane, click Devices and then, Variables
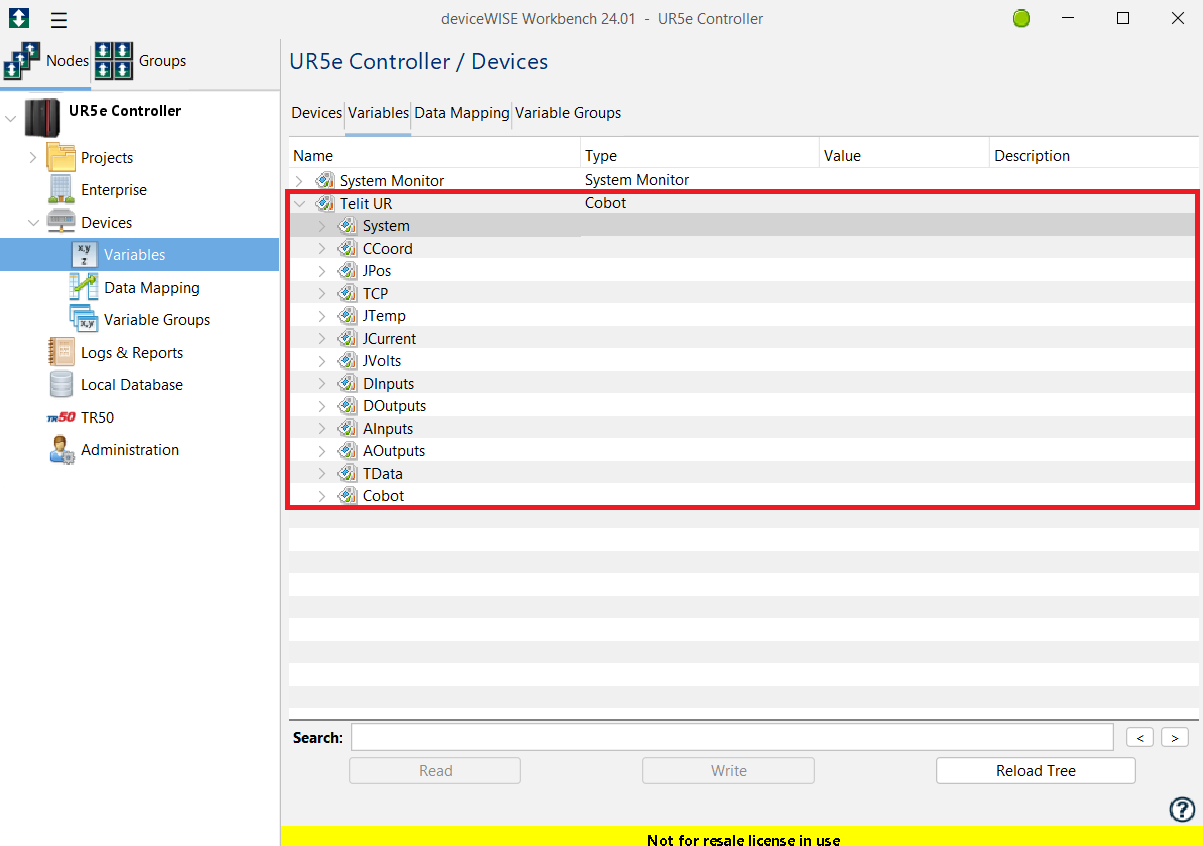
The Variables window appears as the right pane. The Variables window provides a tree format that lists the started devices in the node. The devices must be in the Started state to be included in the Variables window.
| Variables | Description |
|---|---|
| System (URXe System) | Presents a large collection of variables associated with key values and status indicators of the URX/URXe Cobot System. Those are: 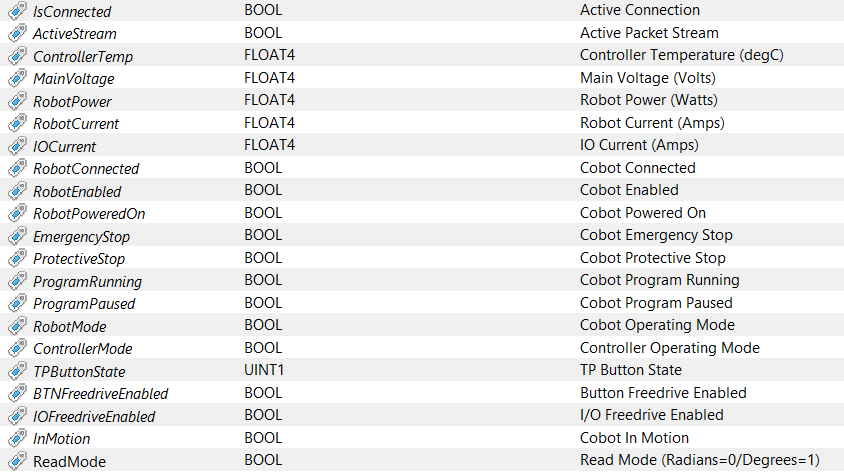 |
| CCoord (Cartesian Coordinates) |
The CCoord variable represents the current cartesian position values of the manipulator arm. The values are represented as X, Y, Z spatial position values in millimeters and Rx, Ry, Rz (roll, pitch, yaw) values in either degrees or radians depending on the ReadMode setting. |
| JPos (Joint Positions) | The current joint coordinate position values of the manipulator arm. The values are presented as base, shoulder, elbow, wrist1, wrist2, wrist3 position values in either degrees or radians depending on the ReadMode setting. |
| JTemp (Joint Temperatures) | Current Joint Temperature in Celcius. |
| JCurrent (Joint Currents) | Current Joint electrical current in amps. |
| JVolts (Joint Voltages) | Current electrical voltage in volts. |
| DInputs (Digital Inputs) | Current state of the digital input. Digital inputs are read-only. Values for both controller based I/O and for tool end point based I/O are accessible within this node. |
| DOutputs (Digital Outputs) | Current state of the digital output. Digital outputs are read-write capable. Values for both controller based I/O and for tool end point based I/O are accessible within this node. |
| AInputs (Analog Inputs) | Current state of analog input values. Analog inputs are read-only. The range and domain values for the analog I/O type can be set to 0 or 1 representing the 4-20 mA Current and 0-10 VDC Voltage values presented on the training pendant user interface. |
| AOutputs (Analog Outputs) | Current state of analog output values. Analog outputs are read-write. The range and domain values for the analog I/O type can be set to 0 or 1 representing the 4-20 mA Current and 0-10 VDC Voltage values presented on the training pendant user interface. |
| TData (Tool Data) | The TData variable presents the current states and values of the Tool I/O specific interfaces supported including the analog pin values supported by the Tool I/O. The analog inputs are read-only capable. |
| Cobot (Cobot Information) | Presents a large collection of values of the system. Variables are: the model number, the serial number, the version number, and the detailed Polyscope Version number for the Universal Robot system. |